


Расскажите, пожалуйста, с чего начался ваш проект?
Антон Бройко, кандидат технических наук, доцент кафедры микро- и наноэлектроники ЛЭТИ: В 2012-2013 году у нас велась работа, связанная с летающими роботами. Нужно было сделать для них движитель, то есть актюатор. Тогда еще не рассматривался конкретный материал. Мы сконструировали микромеханические актюаторы, начали их активно исследовать, написали обзорную статью. Наши устройства были тепловыми, то есть в основе их работы лежало температурное расширение и деформация. Так, нас заинтересовала идея гибких, мобильных и хорошо масштабируемых движителей, а ионные полимер-металлические композиты показались вполне перспективными.
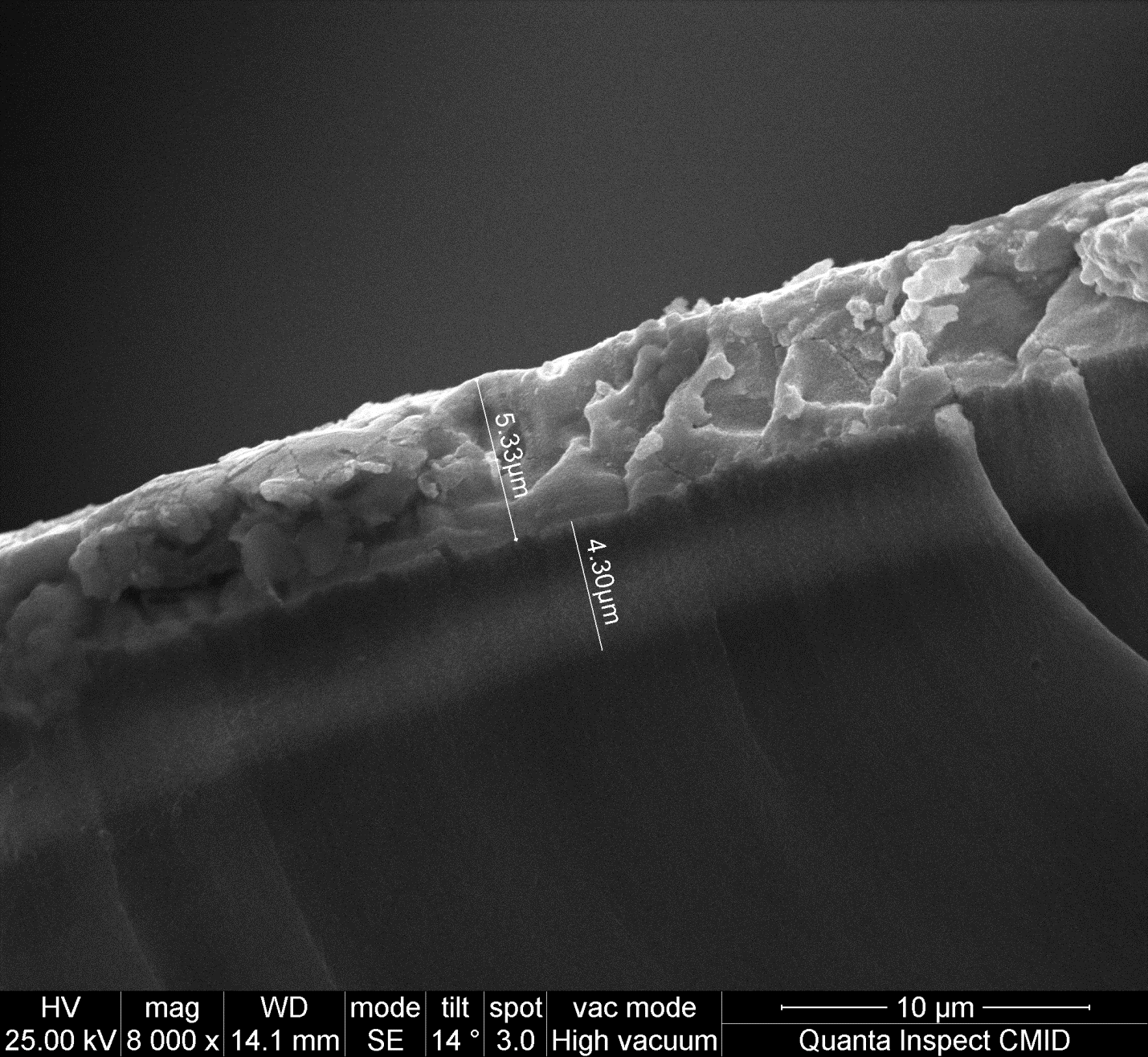
Иван Хмельницкий, кандидат химических наук, доцент кафедры микро- и наноэлектроники ЛЭТИ: Эти материалы представляют собой полимерную ионообменную мембрану с полярными сульфогруппами, на которую с двух сторон нанесены металлические электроды. Обычно в качестве материала электродов используется либо платина, либо золото, потому что у них хорошая проводимость и еще они инертны, то есть почти ни с чем не реагируют. Особенностью этих актюаторов является то, что они функционируют в мокром виде, то есть должны быть пропитаны растворителем. На электроды подается разность потенциалов, из-за чего положительно заряженные ионы в жидкости внутри мембраны будут двигаться. Они всегда гидратированы, то есть окружены молекулами воды; те, в свою очередь, связаны друг с другом водородными связями. В конечном счете получается, что при подаче разности потенциалов у нас движутся не просто ионы, но и толща воды внутри мембраны. Мембрана, соответственно, будет менять свою форму, в одном месте разбухая, в другом — сжимаясь.
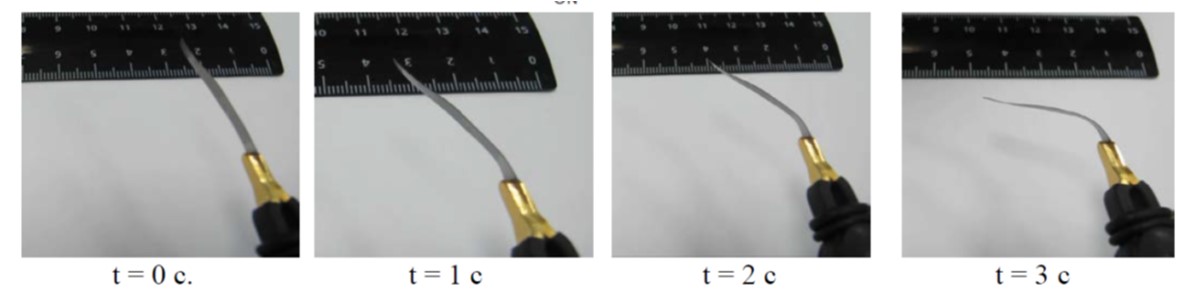
В итоге мы написали заявку на грант РНФ, выиграли его, а затем и получили продление — вот только что закончился наш пятилетний проект. На первом этапе мы занимались разработкой движителей для плавающих роботов, для рыбок. Такие актюаторы — полоски примерно 2–3 сантиметра длиной и полсантиметра шириной — при подаче малого напряжения от одного до пяти вольт могут сильно изгибаться, почти под прямым углом. При большем напряжении, конечно, они и в спираль скрутятся, но электроды закоротятся: в самом начале у нас просто сгорел один образец. Дальше, мы конечно, подобрали условия, чтобы изгиб был значительным даже при небольшом напряжении.
При всем этом у нас была проблема: тонкий металл электрода гибок, но при долгом многократном изгибе разрушается. Мы пробовали самые разные материалы в качестве электродов, но в конце концов пришли к органическим проводящим полимерам. Например, известен такой проводящий полимер — полианилин, он давно используется в качестве красителя. Более новый — композит PEDOT:PSS, который сейчас является одним из основных материалов в печатной электронике. Его использовали по-разному, и для покрытия фотопленки, и для экранов, но нам важнее всего то, что он обладает очень хорошей проводимостью. Мы научились наносить его на поверхность нашей ионообменной мембраны в полимерном нерастворимом виде, получая электроды, превосходящие металлические по своей долговечности и гибкости. Интересно, что электроды PEDOT:PSS при подаче напряжения вступают в электрохимическую реакцию, в результате которой в них встраиваются ионы из мембраны. Из-за этого полимер удлиняется, а затем укорачивается вместе с основой, на которую нанесен. Актюаторы с такими электродами в водной среде даже лучше изгибаются, чем с металлическими, хотя сопротивление электродов у них ниже.
И на этих материалах вы создали своих роботов?
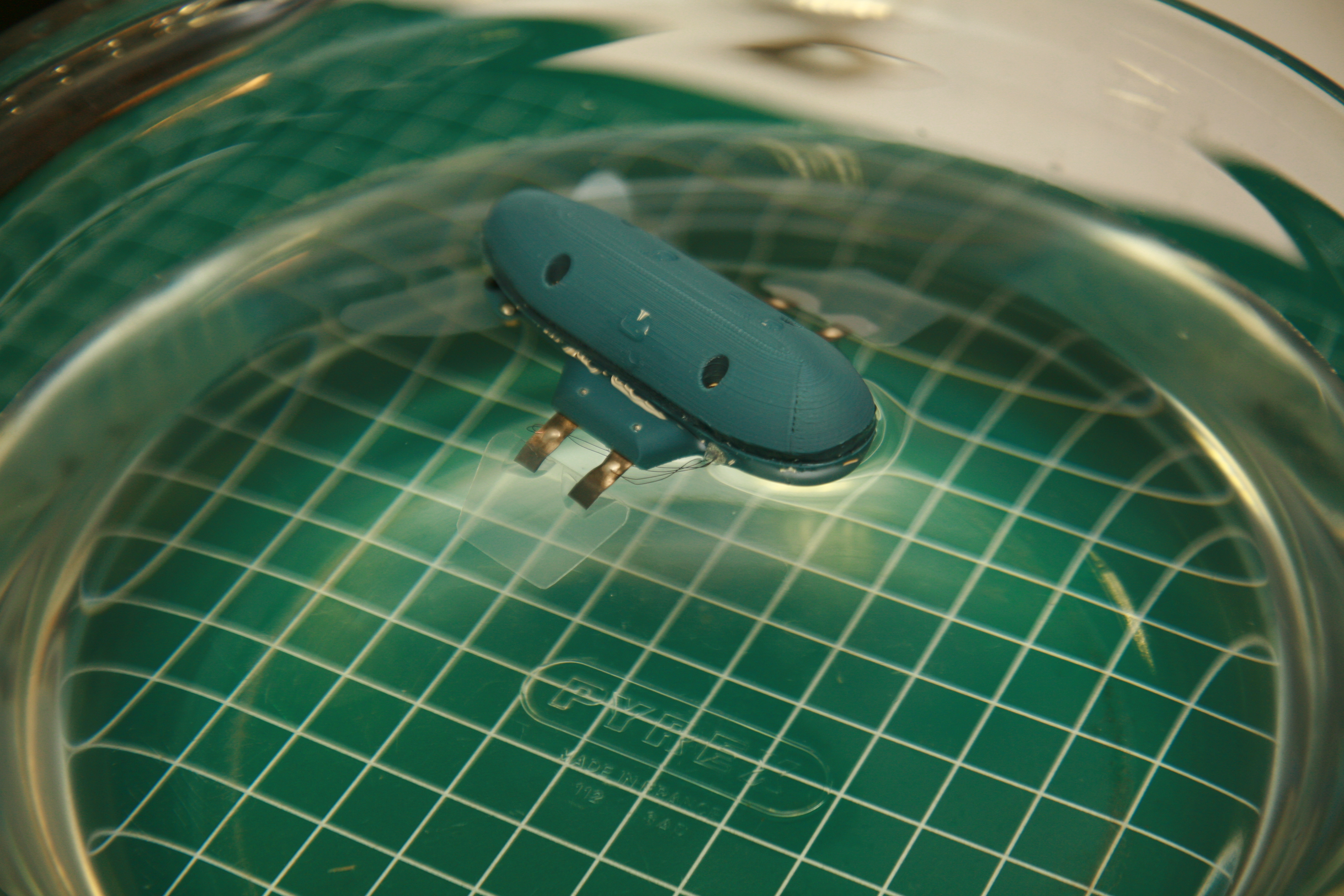
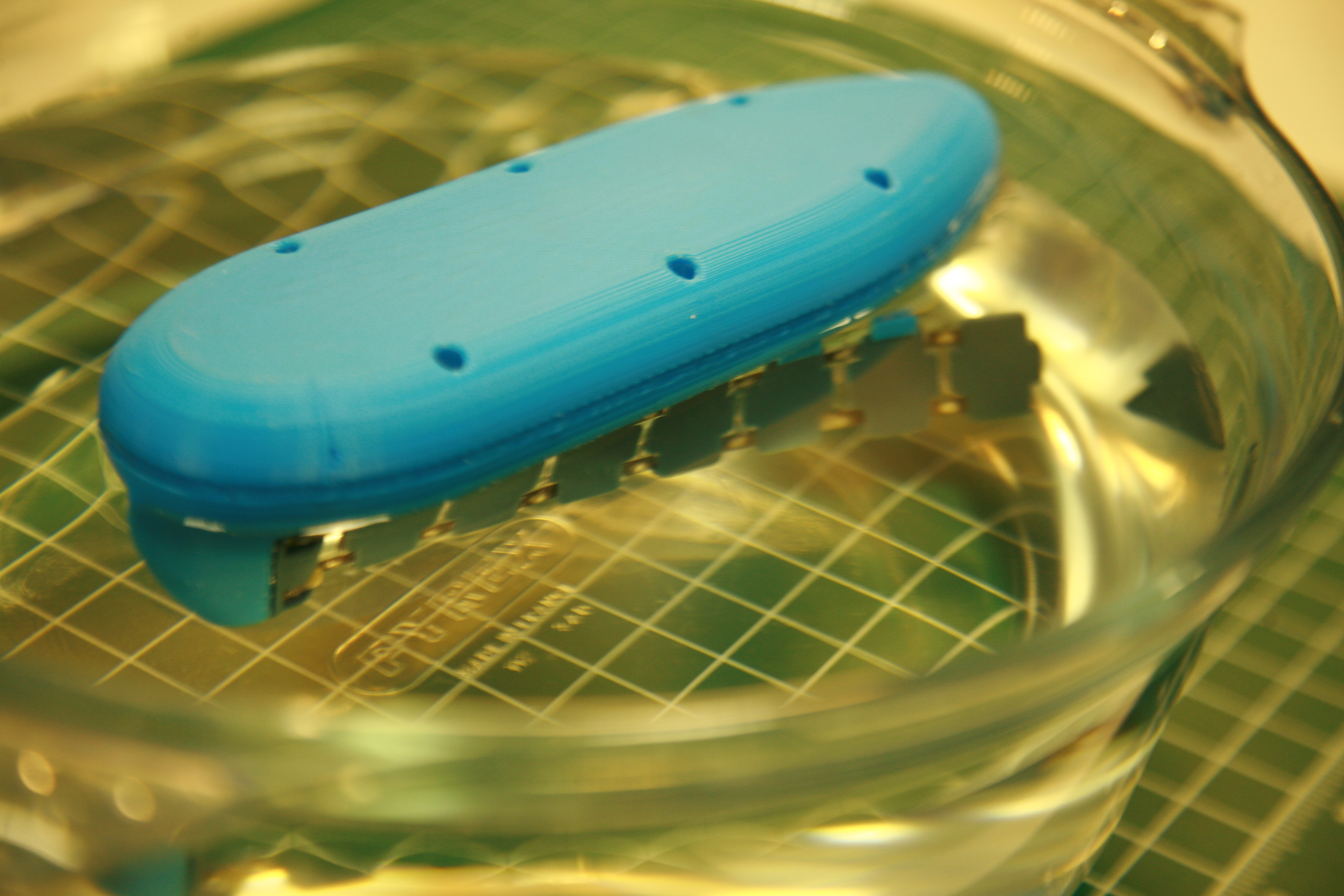
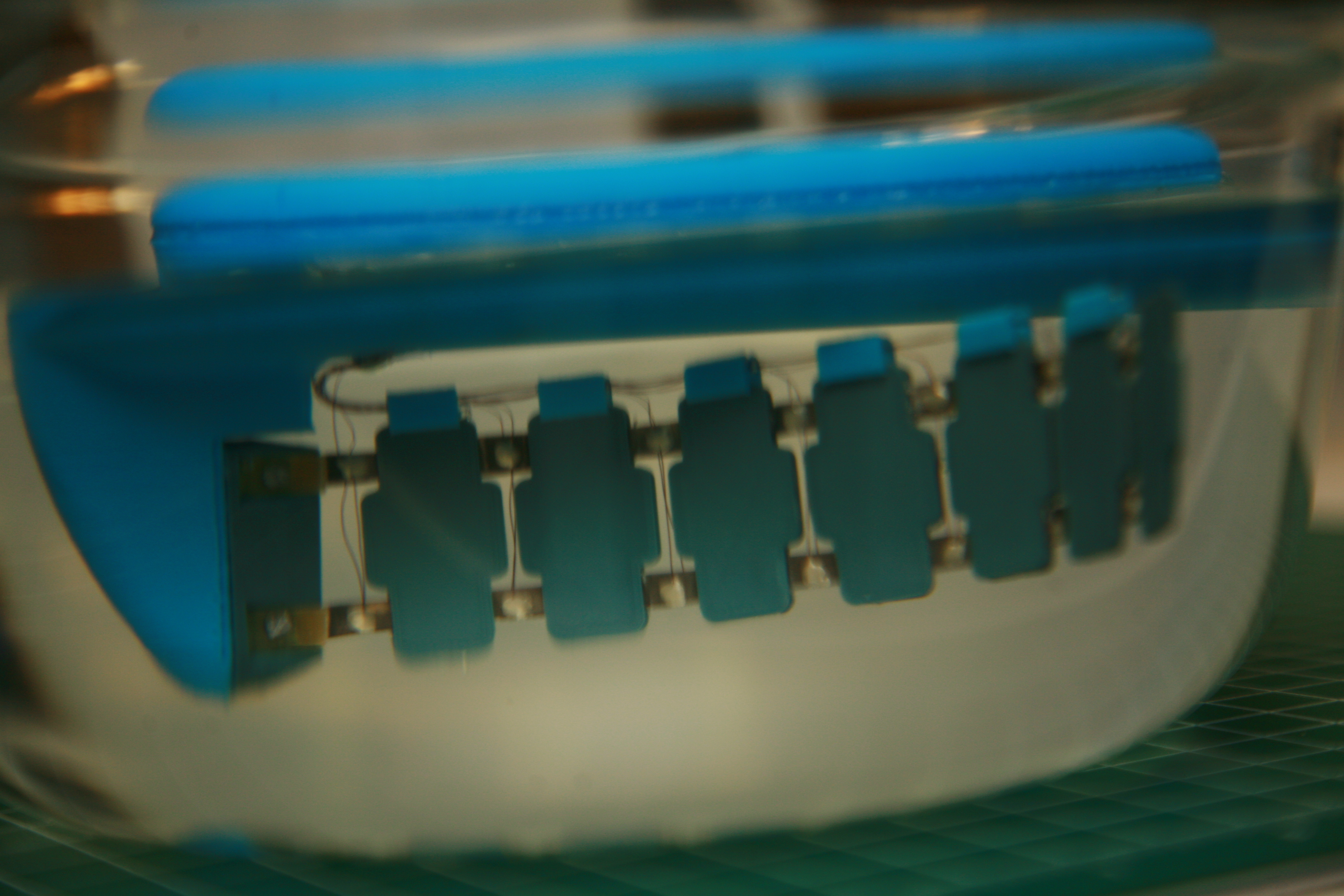
И.Х.: Да, несколько типов. Мы условно назвали их «скат» и «угорь»: у первого было два плавника по бокам, а у второго целый ряд актюаторов, соединенных через непроводящие элементы и создающих волнообразные движение. Собственно, у рыб и есть два этих основных типа, они перемещаются либо за счет плавников, либо за счет волнообразного изгибания всего тела. А началось наше моделирование с «катамаранчика», к которому был приделан хвост.
А.Б.: Мы взяли классификацию движения рыб из зоологии и на основе нее создали модели роботов, демонстрирующих эти виды движения. Это нужно было для того, чтобы показать, что мы можем воспроизвести практически любой вид движения с использованием наших актюаторов.
Можете привести примеры ситуаций, когда нужно использовать один тип, а когда — другой?
А.Б.: У рыб, которым свойственны внезапные ускорения, форма тела и способ движения иные, чем у рыб, которые преодолевают огромные расстояния, плывя с постоянной скоростью — это известно из биодинамики плаванья рыб. Соответственно, если мы проектируем робота, который выполняет функцию наблюдения за акваторией, для него скорее всего подойдут способ движения рыб, которые «преодолевают огромные расстояния, плывя с постоянной скоростью», а если тебе нужен робот, который совершает специальные быстрые операции — приплыл, посмотрел, совершил какие-то операции и уплыл — другой тип движения. Что касается ходячих роботов, там такие же проблемы.
Вы ведь их тоже делали?
И.Х.: После плавающих роботов — это был следующий этап нашего исследования. Все видели ролики с роботами от Boston Dynamics, которые могут ходить в разных трудных условиях, в горы лазить, носить что-нибудь с собой. Они сделаны на обычных двигателях, а в случае микророботов приходится использовать альтернативные виды движения, потому что здесь важна автономность, малое потребление энергии и способность передвигаться долгое время.
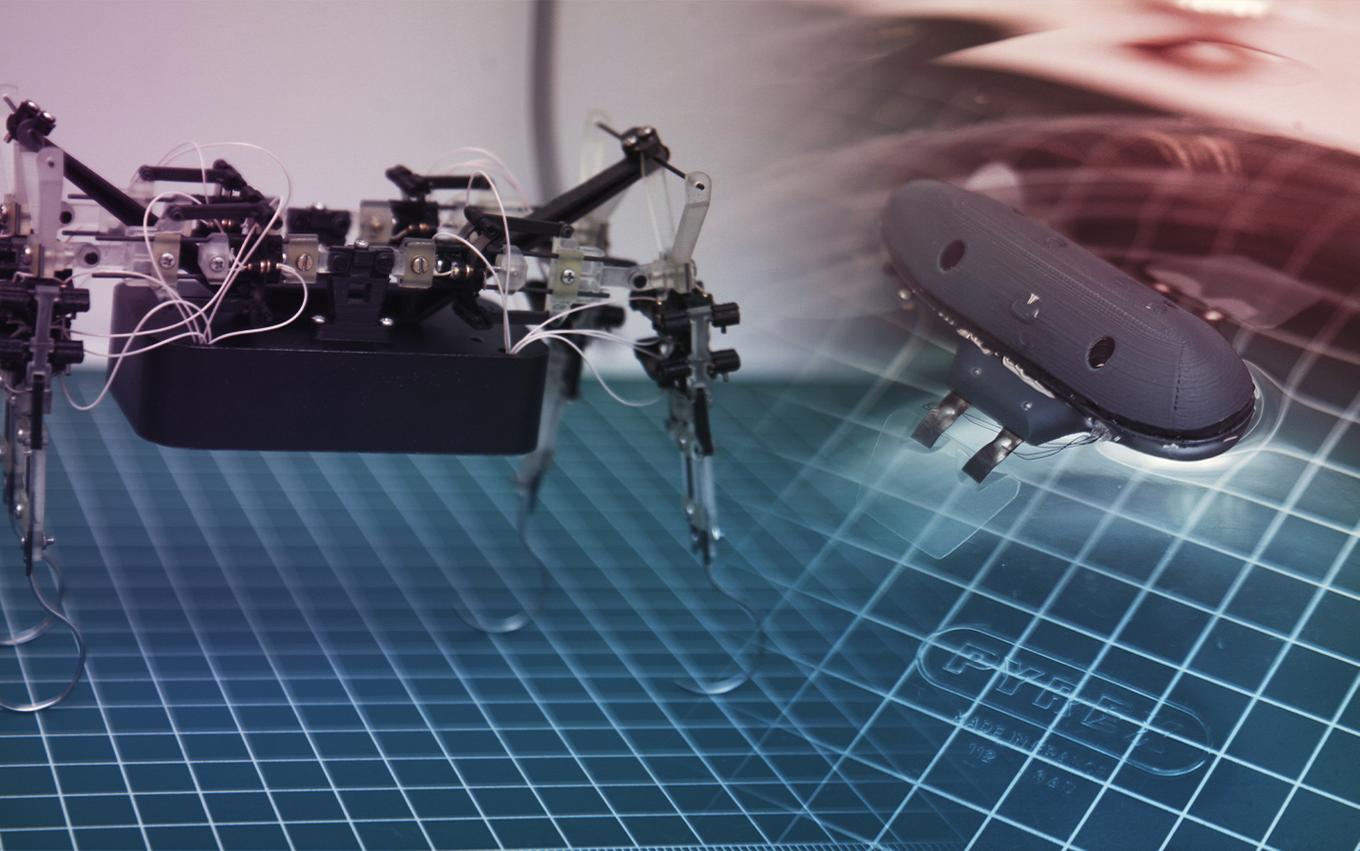
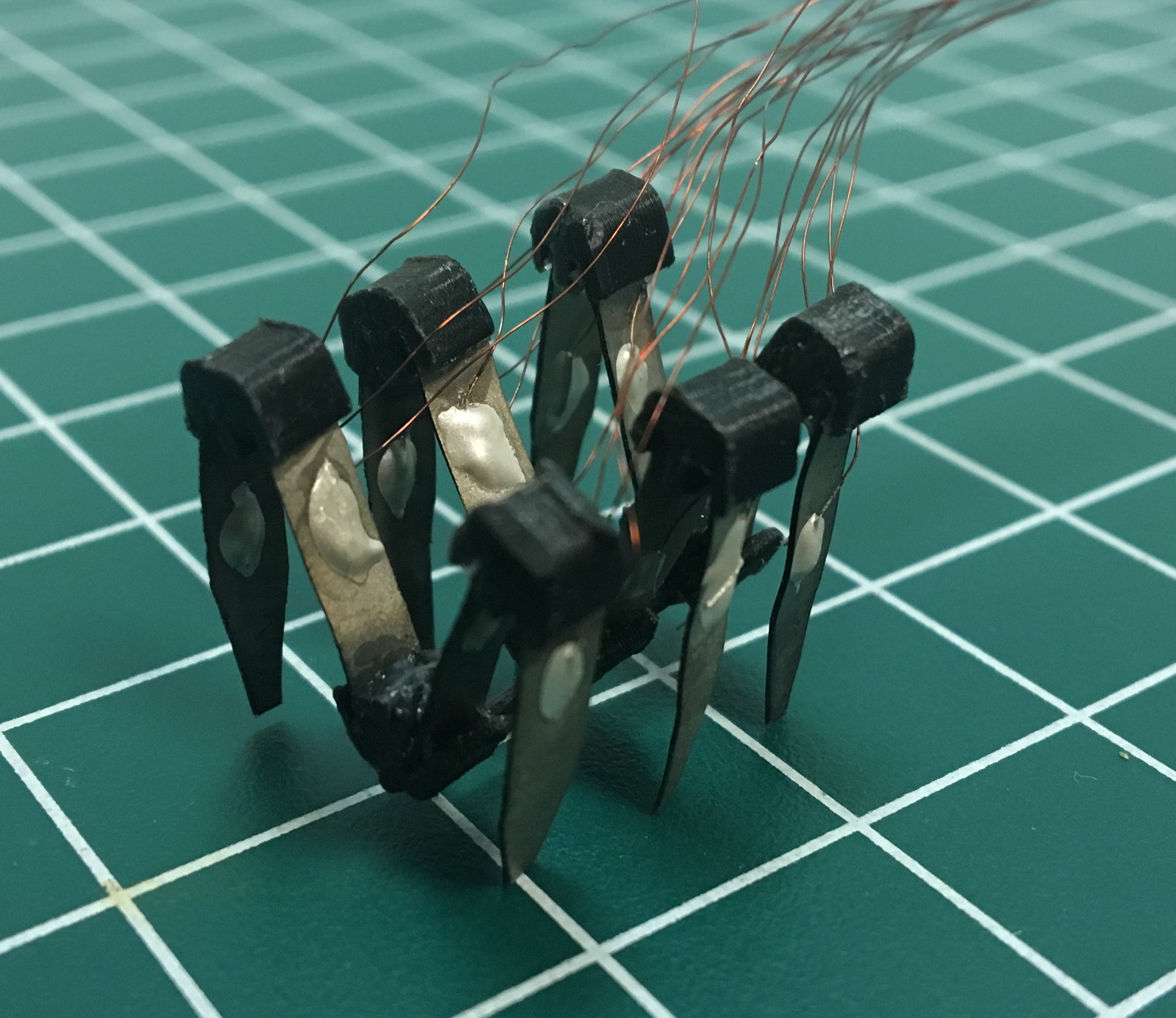
Сначала мы сделали маленького робота «жука» с шестью двухсуставными ножками-актюаторами. Он неавтономный, к каждому актюатору шли проводки, наподобие машинки с проводным пультом управления. Позже был создан более сложный и крупный робот «конь». Его четыре ноги имели также актюаторы для сгибания и поднятия. Каждую ногу сгибало два актюатора, а для поднятия конечности использовалось четыре. Это требует достаточного количества энергии, хотя и механика была максимально простой — каждая нога передвигалась по очереди отдельно, поэтому он оказался очень неторопливым. Следующего робота мы решили ускорить за счет использования шести ног, которые он передвигал одновременно по три, как таракан. Хотя, исходя из его размеров, скорее как тараканище… Для оптимизации движения мы сделали на концах ног датчики касания. Их получилось реализовать на том же материале, что и актюаторы: мембрана может генерировать разность потенциалов на электродах при ее механическом изгибе.
Как вы испытывали роботов?
И.Х.: Задача у них была достаточно простая. У плавающих — плавать из точки А в точку Б в тазике. Доплыть и не завернуть по кругу или в другую сторону. Поэтому мы пробовали разные типы движения. Материал такой, что, бывает, в одну сторону изгибается хорошо, в другую похуже. И это надо корректировать. Шагающие роботы могли ходить только по плоской поверхности, потому что они где-то ногу не очень высоко поднимают, передвигаются на малые расстояния.
Плавающего робота держит архимедова сила, а для шагающего робота очень важен вопрос веса, чтобы он мог себя передвинуть. Тоже испытание. Для плавающих систем есть задача разработать механизм, чтобы робот держался в толще. Наши роботы в основном плавали по поверхности, но материалы могут использоваться для создания своего рода плавательных пузырей, как у рыб: при подаче напряжения происходит электролиз воды, и она превращается в водород и кислород. За счет этих газов и можно реализовать всплытие робота.
А можно сделать летающих роботов на основе ваших разработок?
И.Х.: Наши актюаторы можно использовать и создания для летающих роботов. Там тоже возможны разные типы движения — некоторые птицы парят, а некоторые машут как колибри с очень высокой частотой. Наши актюаторы больше подходят для последних, потому что на определенных частотах, соответствующих механическому резонансу актюатора, их можно использовать для движения в воздухе.
Но у наших материалов есть существенный недостаток вообще для использования на воздухе. В мембране есть жидкость, которая со временем испаряется, плюс реакция электролиза. Процесс идет довольно медленно, так что мы пытались с этим бороться: инкапсулировали актуаторы, покрывали их тонкой полимерной пленкой, не пропускающей влагу. Также можно использовать внутри актюатора вместо воды ионные жидкости — по сути жидкие соли, в которых есть только ионы. И здесь снова возникает проблема: они могут растворить что угодно, и клеточные мембраны, и живые ткани, если пытаться применять их в медицине.
А какие вообще у них могут быть применения? Все же довольно необычная конструкция.
И.Х.: Плавающие — для мониторинга окружающей среды, тем более жидкость внутри не замерзает при нуле из-за физических особенностей системы. Однако наиболее перспективным направлением является как раз медицинское. У нас есть прототип насоса для доставки лекарственных препаратов, наподобие инсулиновой помпы. Также подобные актюаторы можно использовать в лапароскопии, когда нужно попасть внутрь брюшной полости пациента и произвести некоторые операции через маленькие разрезы. Они могут служить хирургическими инструментами. Часто такие актюаторы называют «искусственными мышцами», и использовать их можно соответствующим образом. Конечно, они не работают быстро и интенсивно, как мышцы в руках или ногах, но для управления хрусталиком глаза, в качестве элементов кардиостимулятора их характеристики вполне достаточны. В мире этот вопрос активно изучают.
И для таких приложений очень важно разрабатывать модели, которые учтут все факторы, влияющие на нашего микроробота. Увы, его свойства плохо воспроизводятся, а внутренние события довольно сложны для анализа и предсказания. Мы создали свою модель, в которой попытались учесть электрические и химические процессы движения ионов и физические процессы, связанные с давлением жидкости внутри мембраны.
А.Б.: Моделей самих движений существует великое множество, самая простая — эмпирическая, когда есть входной (управляющий) сигнал и на выходе – реакция системы, связь между входом и выходом описывается аппроксимационной функцией. Такие модели часто называют «black box» («модель черного ящика»), так как мы не описываем физические принципы, которые лежат в основе. Такой подход работает, если механизмы хорошо и подробно изучены, либо нет нужды в их изучении. Но это не наш случай: само движение имеет сложный вид и особенности. Чтобы разобраться с ними, необходимо создавать модели, максимально хорошо описывающие физикохимию процессов. Те, что достаточно подробно описывают физические процессы и основаны на фундаментальных физических законах (закон сохранения массы, закон сохранения заряда, закон сохранения энергии и так далее) называют «white box model». Разработка этих моделей началось еще в 80-е годы прошлого века, но тогда не было ресурсов для решения уравнений, описывающих происходящее в системе, да и сейчас зачастую это долгое и дорогое удовольствие.
Процессы, которые рассчитываются в наших мембранах, имеют высокую математическую сложность, потому что приходится решать большое количество нелинейных сопряженных дифференциальных уравнений. Еще три года назад мы пытались в тестовом режиме посчитать более простую модель на университетском компьютере с помощью пакета ПО для расчетов COMSOL, это заняло пять суток. Для того, чтобы посчитать все необходимое, нам потребовалось бы гораздо больше времени порядка четырех-шести месяцев, а стоимость составила бы несколько миллионов рублей. Однако мы решили задачу на обычном, пусть и довольно мощном компьютере. Наша модель оказалась универсальной по размерности (в каких-то случаях одномерная, в каких-то двухмерная). Очень подробно рассмотрели динамику ионов и воды в мембране; комплекс уравнений более-менее признан, мы немного добавили-убрали, плюс не учитывали некоторые параметры, например вязкость полимеров. А в плане вычислительного алгоритма мы абсолютно оригинальны. Такую же задачу одновременно с нами решали исследователи из Японии и Китая, но другим методом. В мире кроме их и нашей статей пока нет публикаций, описывающих столь подробно данные процессы с возможностью их разрешения, но такие работы обязательно будут.
Примечательно, что в своей работе мы тщательно описали методологию, так что если человек обладает знаниями в вычислительной физике, то он сможет запустить алгоритм, не прилагая ни финансовых, ни экстравагантных интеллектуальных усилий. Нужны лишь базовые знания, чтобы получить результаты мирового уровня. В подобных нашей системах много процессов, которые необходимо изучать, и если это сделать, то на их основе мы сможем создавать модели для быстрого расчета параметров, в том числе и чтобы поместить их в контроллер, управляющий роботом. Но модель в большей степени исследовательская, для получения научных результатов.
Значит, проект в целом был исключительно научным?
А.Б.: Да, мы решали научные задачи, в них не входит доведение до инженерного исполнения. Нам надо было продемонстрировать возможности печатных технологий, масштабируемость и, конечно, в основном то, что принципы работают, что это или иное движение реализуемо. Мы создаем основу в понимании сложных физико-химических процессов в мембране. Для развития и проектирования актюаторов на основе ионных полимер-металлических композитов необходимы надежные модели их движения. Наша задача — создать для конструкторов методики, на основании которых они могли бы взять и сделать уже каких-то конкретных роботов, с заданными эксплуатационными характеристиками: плавающих, ходячих, летающих и прочих. Инженерам нужно, чтобы было понятно и описано, как работает — это и есть наши задачи. В России пока что нет групп, кроме нашей, которые бы занимались этой тематикой.

